近日���,我院2023級碩士研究生胡勇軍(導(dǎo)師:莫帥教授)以共同第一作者在機械領(lǐng)域國際權(quán)威學(xué)術(shù)期刊《Mechanism and Machine Theory》(中科院一區(qū)�����,Top期刊)發(fā)表研究成果“Dynamic modeling and performance analysis of a new friction stir welding parallel robot”。該成果以廣西大學(xué)機械工程學(xué)院為第一單位及通訊單位�。
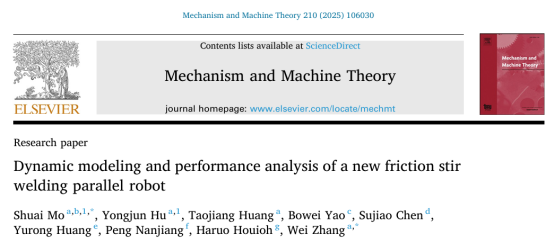
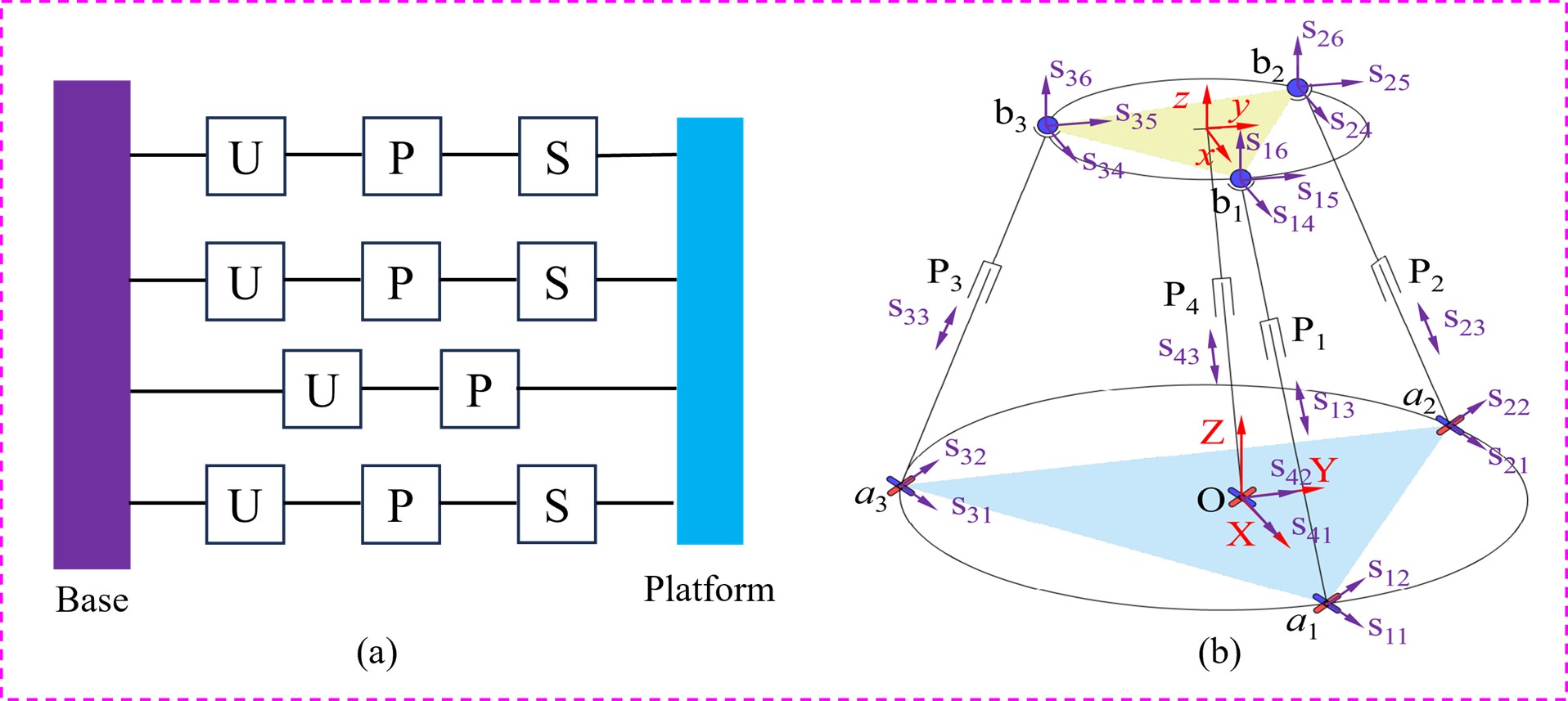
攪拌摩擦焊是一種新型固態(tài)連接技術(shù)�,具有殘余應(yīng)力小�����、焊接缺陷少和無污染等優(yōu)勢,被廣泛應(yīng)用于航空航天和地鐵等大型焊接領(lǐng)域�����。隨著機器人負載承載能力和位姿控制精度的提升��,關(guān)節(jié)機器人已證實為攪拌摩擦焊過程中成本效益最高且靈活性最佳的解決方案之一����。攪拌摩擦焊并聯(lián)焊接機器人動力學(xué)建模與分析是機器人設(shè)計�、力學(xué)控制和性能設(shè)計的基礎(chǔ),因此����,開展攪拌摩擦焊并聯(lián)機器人動力學(xué)建模與動態(tài)性能分析研究對機器人設(shè)計、提升焊接自動化和提高系統(tǒng)焊接質(zhì)量具有重要的理論意義與工程價值���。
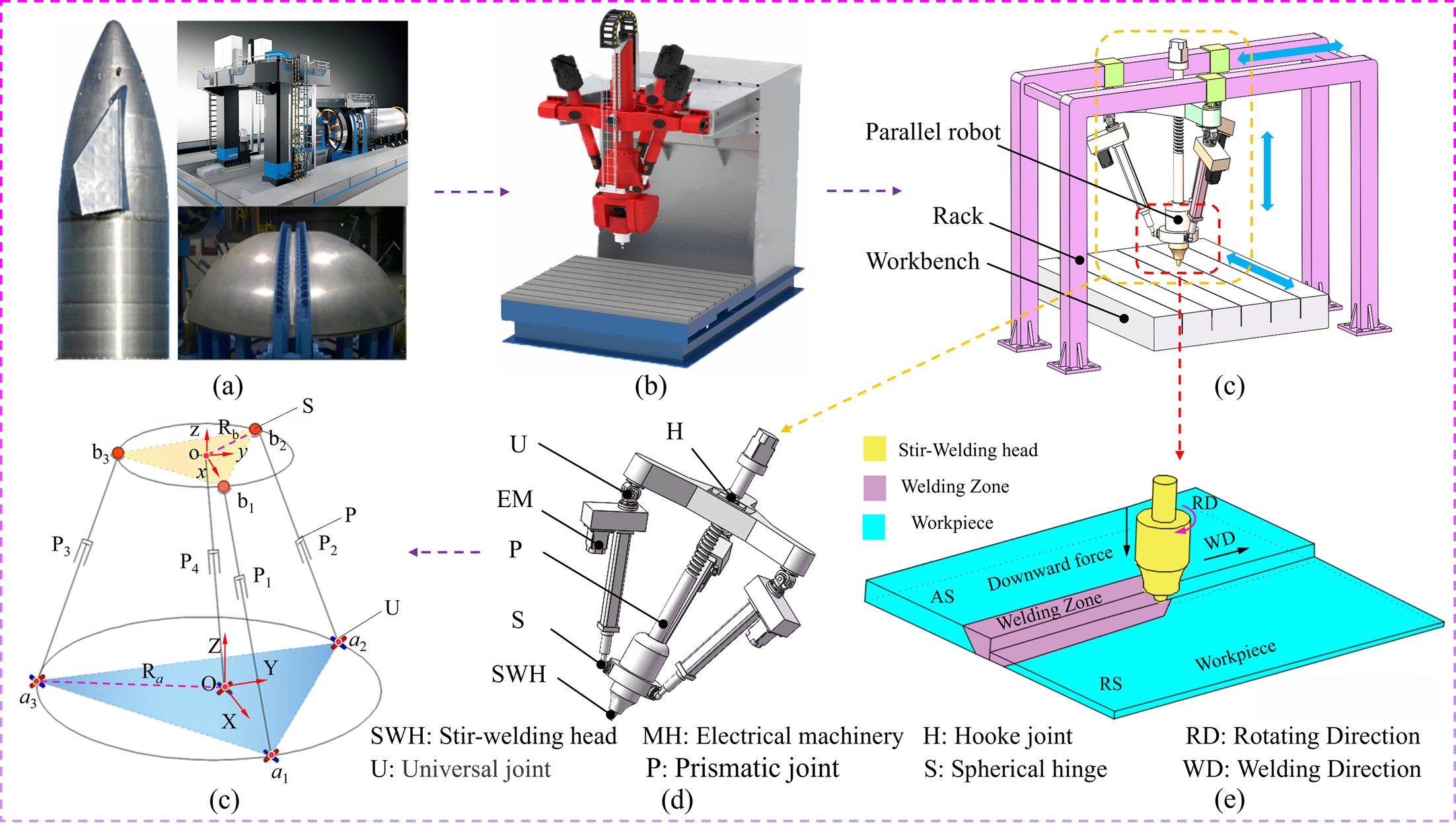
該成果創(chuàng)新設(shè)計了一種新型攪拌摩擦焊并聯(lián)焊接機器人����,并對其進行正/逆動力學(xué)分析,求解不同位置姿態(tài)下攪拌摩焊并聯(lián)焊接機器人工作空間���,開展了考慮含間隙下攪拌摩擦焊并聯(lián)焊接機器人不同焊接狀態(tài)下系統(tǒng)的正/逆動力學(xué)研究。研究結(jié)果表明系統(tǒng)逆運動學(xué)與正運動學(xué)求解結(jié)果一致�,逆動力學(xué)與正動力學(xué)相對應(yīng)���,驗證了新型攪拌摩擦焊并聯(lián)機器人模型的正確性���。研究證實球鉸間隙是影響機器人精度不可忽略的重要因素,可通過動態(tài)性能指數(shù)確定其最佳焊接工藝區(qū)間���,該成果為實現(xiàn)焊接自動化和提高攪拌摩擦焊并聯(lián)焊接機器人焊接質(zhì)量提供技術(shù)支持和理論依據(jù)�。
研究工作得到廣西科技重大專項(No.AA23073019��、No.AA24263074)����、廣西杰出青年科學(xué)基金項目(No. 2025GXNSFFA069016)�����、國家自然科學(xué)基金(No.52265004)等項目資助�。


